Como controlar servo com Arduino
Como controlar servo com Arduino
Seja você um novato curioso no mundo da eletrônica ou um entusiasta experiente, dominar o controle de um servo motor com Arduino abre um leque fascinante de possibilidades para seus projetos.
Neste guia direto e prático, você descobrirá como controlar servos motores com Arduino, esse pequeno componente é perfeito a criação de braços robóticos ágeis ou plataformas móveis.
O Que é um Servo Motor?
Antes de mergulharmos no código, vamos entender o que é um servo motor tão especial. Diferentemente de um motor DC comum que gira continuamente, um servo motor é projetado para girar com precisão para uma posição angular específica.
Ele faz isso através de um sistema de feedback interno que monitora sua posição e corrige qualquer desvio.
Pinos do servo motor:
Geralmente, um servo motor possui três fios:
- Alimentação (VCC): Usado para conectar ao pino 5V do Arduino
- Terra (GND): Usado para conectar ao terra do Arduino.
- Sinal: Este fio recebe pulsos PWM (Pulse Width Modulation) do Arduino para determinar a posição angular desejada.

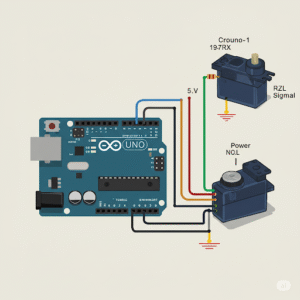
Conectando o Servo ao Arduino:
- 1. Identifique os fios do seu servo: Consulte o datasheet do seu servo para identificar corretamente os fios de alimentação, terra e sinal. As cores podem variar dependendo do fabricante.
- 2. Conecte o fio de alimentação (VCC) do servo ao pino de 5V do Arduino.
- 3. Conecte o fio de terra (GND) do servo a um pino de GND do Arduino.
- 4. Conecte o fio de sinal do servo a um pino digital PWM do Arduino. Pinos PWM são marcados com um símbolo “~” (til) na placa Arduino (por exemplo, pinos 3, 5, 6, 9, 10, 11 na maioria dos Arduinos Uno).
Implementando o Código no Arduino
-
- 1. Inclua a biblioteca Servo: No início do seu sketch (código Arduino), adicione a seguinte linha:
#include
-
- 2. Crie um objeto Servo: Declare uma variável do tipo Servo para controlar o seu servo. Escolha um nome significativo para essa variável:
Servo servo;
-
- 3. Associe o servo a um pino: Dentro da função setup(), utilize a função attach() para especificar a qual pino digital o fio de sinal do servo está conectado:
void setup() {
servo.attach(9);
}
- 4. Controle a posição do servo: Dentro da função loop() (ou em qualquer outra parte do seu código onde você deseja controlar o servo), utilize a função write() para definir o ângulo desejado. Os ângulos geralmente variam de 0 a 180 graus:
void loop() {
servo.write(0);
delay(400);
servo.write(180);
delay(400);
}
Material Utilizado:
- Tecnologia sem fio LIGHTSPEED: Desempenho de nível profissional com resposta rápida e confiável.
- Sensor HERO 25K: A mesma precisão e desempenho do G502 HERO, agora sem fios.
- Design icônico e personalizável: 11 botões programáveis, scroll hiperveloz e sistema de peso ajustável.
- Link: https://amzn.to/4k2WxNu
Conclusão
Controlar um servo com Arduino é uma habilidade fundamental para qualquer entusiasta de eletrônica e robótica. Com a biblioteca Servo.h e algumas linhas de código, você pode adicionar movimento preciso e controlado aos seus projetos de forma simples e divertida.
Links de Itens em Promoção na Amazon:
- Logitech – https://amzn.to/4cdJlTn
- Monitores – https://amzn.to/4iR5mKf
- Gabinetes – https://amzn.to/4hYABSn
- Mouse gamer – https://amzn.to/3QVWRBp
- Seleção Logitech – https://amzn.to/4d1hPZH
- As Crônicas dos Mortos – https://amzn.to/3FSVctZ
- Casa Inteligente – https://amzn.to/4jZySO4
Acompanhe o Vídeo Tutorial